-
Notifications
You must be signed in to change notification settings - Fork 7
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Controller 101 + Transforms 101 (#224)
* Controller 101 * Add next steps * Moved Controller 101 to Service Overviews * Going overboard on transforms / poses explanation * Splitting and reorganization * Change Controller 101 name + minor changes --------- Co-authored-by: Kyle Coble <kwc57@cornell.edu>
- Loading branch information
1 parent
4c3681f
commit 6a79322
Showing
4 changed files
with
262 additions
and
6 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,93 @@ | ||
| --- | ||
| id: create-and-propagate-poses | ||
| title: Create and Propagate Poses | ||
| --- | ||
|
|
||
| ## Understanding Transforms and Poses | ||
|
|
||
| Before we can send our robot out to drive a **track** (or **path**), | ||
| we need to understand where our robot is and where we want to send it. | ||
| For that purposes, please refer to **[Concepts - Transforms and Poses](/docs/concepts/transforms_and_poses)** | ||
| before continuing on with this overview. | ||
|
|
||
| ## Creating and Propagating Poses for the Controller | ||
|
|
||
| When you want the Amiga to perform a specific movement, you need to provide it with a series | ||
| of poses that describe that movement. | ||
| We call these poses **waypoints** and the series of them a **track*.* | ||
|
|
||
| For a better understanding of the `Pose` structure, please refer to our | ||
| [`Pose` proto overview](/docs/concepts/transforms_and_poses/#the-farm-ng-pose-proto). | ||
|
|
||
| ### Example | ||
|
|
||
| There are several ways of creating poses and commanding your `Controller` to follow them. | ||
| Let's check how to use the concepts learned here to create poses that represent a `pi turn` | ||
| (also know as a U turn) using the `pose` structure: | ||
|
|
||
| **NOTE**: Please note that in this example we propagate the proposes from the robot frame. | ||
|
|
||
| ```python | ||
| def create_pi_turn_segment( | ||
| previous_pose: Pose3F64, next_frame_b: str, radius: float, spacing: float = 0.1 | ||
| ) -> list[Pose3F64]: | ||
| """Compute a pi turn segment. | ||
| Args: | ||
| previous_pose (Pose3F64): The previous pose. | ||
| next_frame_b (str): The name of the child frame of the next pose. | ||
| radius (float): The radius of the pi turn. | ||
| spacing (float): The spacing between waypoints, in meters. | ||
| Returns: | ||
| list[Pose3F64]: The poses of the pi turn segment. | ||
| """ | ||
| # Calculate the total arc length of the half-circle | ||
| arc_length = pi * radius | ||
|
|
||
| # Determine the number of segments, ensuring at least one segment | ||
| num_segments = max(int(arc_length / spacing), 1) | ||
|
|
||
| # Angle increment per segment | ||
| delta_angle = pi / num_segments | ||
|
|
||
| # Distance increment per segment | ||
| delta_distance = arc_length / num_segments | ||
|
|
||
| # Create a container to store the track segment waypoints | ||
| segment_poses: list[Pose3F64] = [previous_pose] | ||
|
|
||
| for i in range(1, num_segments + 1): | ||
|
|
||
| # Calculate the pose for the current segment | ||
| turn_segment: Pose3F64 = Pose3F64( | ||
| a_from_b=Isometry3F64([delta_distance, 0, 0], Rotation3F64.Rz(delta_angle)), | ||
| frame_a=segment_poses[-1].frame_b, | ||
| frame_b=f"{next_frame_b}_{i-1}", | ||
| ) | ||
| segment_poses.append(segment_poses[-1] * turn_segment) | ||
|
|
||
| # Rename the last pose to the desired name | ||
| segment_poses[-1].frame_b = next_frame_b | ||
| return segment_poses | ||
| ``` | ||
|
|
||
| ### Code Breakdown | ||
|
|
||
| Since we're in the robot frame, we always command it to drive forward, for this reason the `y` and `z` | ||
| components of our `Isometry3F64` are always zero. | ||
|
|
||
| - The robot moves forward by delta_distance (linear movement along the x-axis). | ||
| - It rotates by delta_angle about the z-axis. | ||
| - This transformation is then used to calculate the new pose of the robot for that segment. | ||
|
|
||
| In essence, by using Isometry3F64, you're able to succinctly describe both the linear and | ||
| angular movements of the robot for each segment of its pi turn. | ||
|
|
||
| ## Next Steps | ||
|
|
||
| Make sure to check the [Concepts](https://amiga.farm-ng.com/docs/concepts/) page | ||
| to know more about all the services available in your Amiga and how they interact with each other. | ||
|
|
||
| Make sure to also check our [Brain Controller Examples](https://amiga.farm-ng.com/docs/examples/examples-index) | ||
| to test the `Controller` in your Amiga. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,159 @@ | ||
| --- | ||
| id: transforms-and-poses | ||
| title: Transforms and Poses | ||
| --- | ||
|
|
||
| ## Fundamental Concepts | ||
|
|
||
| Before we can create autonomy applications for our robot, | ||
| we need to understand where our robot and other points of reference are. | ||
| The following concepts are critical to understand if you wish | ||
| to develop autonomous robotics applications with your Amiga. | ||
|
|
||
| ### Frames of Reference | ||
|
|
||
| In robotics, a **frame of reference** | ||
| (often called a "**frame**", **coordinate frame**, or "**reference frame**") | ||
| is a description of a coordinate system of 3 orthogonal axes (**x**, **y**, & **z**) defined by | ||
| the position and orientation of the object. | ||
|
|
||
| The two primary frames you need to be aware of are: | ||
|
|
||
| **World Frame (`world`)**: | ||
| Conventionally, this is a fixed frame representing the environment in which the robot operates. | ||
| Think of it as an anchor point that doesn't move. | ||
| If using RTK GPS, a typical world frame coordinate system is defined at the location | ||
| of your RTK base station. | ||
|
|
||
| **Robot Frame (`robot`)**: This frame is attached to the robot. | ||
| As the robot moves, this frame moves with it. | ||
| Considering the robot is not a single point, it is important to define where on the robot | ||
| is considered the center of the `robot` frame axes. | ||
| At farm-ng we choose the center of the robot (in length & width) at ground level. | ||
|
|
||
| Additional relevant frames for your Amiga-based robotics applications | ||
| may include the `camera` frame, the `imu` frame, the `gps_antenna` frame, and so on. | ||
|
|
||
| Each **reference frame** is represented below as a set of red-green-blue axes. | ||
| The frames are connected by 6 degree-of-freedom **transforms**, | ||
| represented below by yellow arrows. | ||
|
|
||
| <!-- 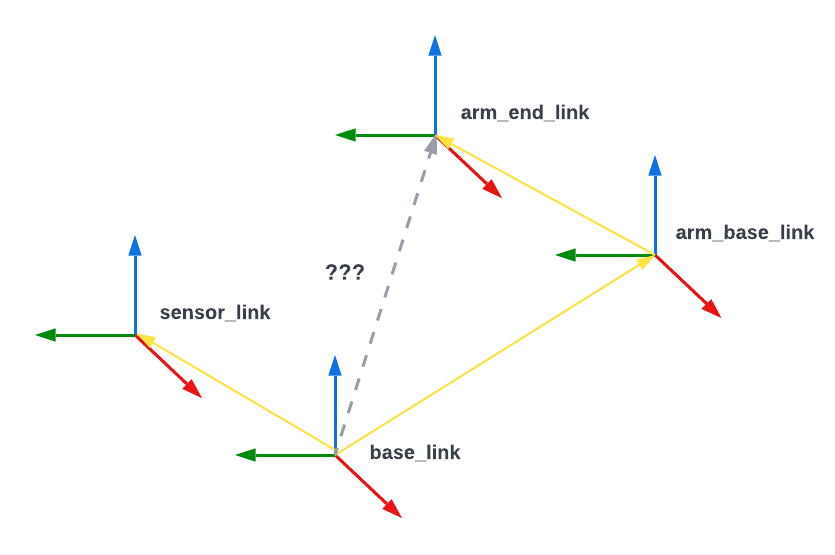 --> | ||
| 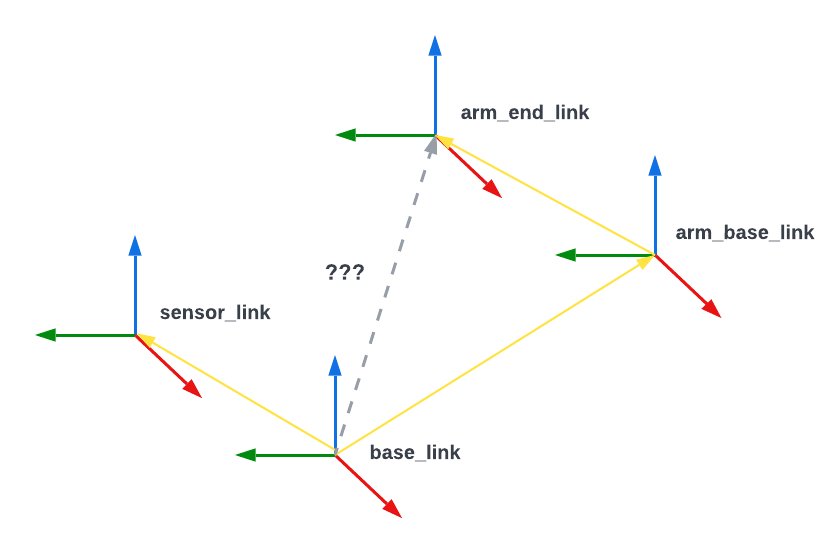 | ||
|
|
||
| *Image Credit: [https://foxglove.dev/blog/understanding-ros-transforms](https://foxglove.dev/blog/understanding-ros-transforms)* | ||
|
|
||
| ### Transformations | ||
|
|
||
| A **transformation**, or **transform**, describes how to move from one reference frame to another. | ||
|
|
||
| Typically in robotics we represent these transforms as an **isometry** transformation in 3D space. | ||
| This is a distance-preserving 6 degree-of-freedom (DOF) transformation | ||
| that includes a translation (3 DOF) and a rotation (the other 3 DOF). | ||
|
|
||
| For instance, we can represent the transformation from the `world` reference frame | ||
| to the `robot` reference frame. | ||
| Our naming convention at farm-ng is to call this the **`world_from_robot`** transformation, | ||
| following a `<parent>_from_<child>` or `<frame_a>_from_<frame_b>` naming convention. | ||
|
|
||
| This transform contains the **translation** along the `world` **x, y, z** axes, | ||
| as well as the **rotation** required to align the axes. | ||
|
|
||
| The **translation**, a 3-dimensional linear offset, | ||
| is represented as a vector of `[x, y, z]` coordinates in the parent reference frame. | ||
|
|
||
| The **rotation**, a 3-dimensional rotation, can be represented in a number of ways, | ||
| but typically is represented as a **quaternion**. | ||
|
|
||
| #### Quaternions | ||
|
|
||
| Quaternions are a type of mathematical object used to represent rotations in 3D space. | ||
|
|
||
| Quaternions consist of four numbers `(x, y, z, w)` (or sometimes in order `(w, x, y, z)`). | ||
| `w` represents the scalar (or real) part of the rotation | ||
| and `x`, `y`, and `z` are the vector (or imaginary) parts. | ||
|
|
||
| Quaternions are an alternative to other methods like Euler angles or rotation matrices. | ||
| Quaternions are particularly useful because they are compact, | ||
| avoid certain problems like gimbal lock, and can be more computationally efficient. | ||
|
|
||
| #### Transform math | ||
|
|
||
| **Transforms** can be mathematically manipulated to understand where **coordinate frames** | ||
| are in relation to one another. | ||
| Most commonly, you will **invert** transforms and you will **multiply** transforms. | ||
|
|
||
| If you know the transform from the `world` coordinate frame to the `robot` coordinate frame (`world_from_robot`), | ||
| you can **invert** that transform to get the transform from the `robot` coordinate frame | ||
| to the `world` coordinate frame (`robot_from_world`). | ||
|
|
||
| ```python | ||
| world_from_robot = robot_from_imu^-1 | ||
| ``` | ||
|
|
||
| If you know two transforms with a common frame, you can **multiply** them. | ||
|
|
||
| Say you know `world_from_robot` and the `robot_from_imu` transform from your | ||
| `robot` frame to your `imu` frame (where the IMU is on your robot). | ||
| You can calculate the transform from the `world` frame to the `imu` frame (`world_from_imu`) | ||
| with transform **multiplication**. | ||
|
|
||
| ```python | ||
| world_from_imu = world_from_robot * robot_from_imu | ||
| ``` | ||
|
|
||
| ### Poses | ||
|
|
||
| We tend to think of where our robot is as a **pose**, a combination of **position** and **orientation**. | ||
| The **position** being where the robot is, and the **orientation** being which way the robot is facing. | ||
|
|
||
| A pose is, however, undetermined as there needs to be a **frame of reference** the position | ||
| and orientation are in. | ||
| Queue **transforms**! | ||
|
|
||
| We can define the **pose** of our robot as the 6-DOF transformation from the `world` frame | ||
| to our `robot` frame (`world_from_robot`). | ||
|
|
||
| We are not limited to representing the `world_from_robot` transformation as a pose. | ||
| Any transform can be represented as a pose by correctly specifying the `frame_a` (parent frame) | ||
| and `frame_b` (child frame) in our | ||
| [**`Pose` protobuf definition**](https://github.com/farm-ng/farm-ng-core/blob/main/protos/farm_ng/core/pose.proto). | ||
|
|
||
| ### The farm-ng `Pose` proto | ||
|
|
||
| :::info | ||
| For the latest definition of the `Pose` structure, please refer to our | ||
| [**`Pose` protobuf definition**](https://github.com/farm-ng/farm-ng-core/blob/main/protos/farm_ng/core/pose.proto). | ||
| ::: | ||
|
|
||
| Each pose has an `Isometry3F64`, which is a representation of rigid body transformations in 3D space. | ||
| In simple terms, it describes how an object moves and rotates in three-dimensional space | ||
| without changing its shape. | ||
| The term "isometry" implies that distances between points remain unchanged during the transformation. | ||
|
|
||
| In the context of robotics, `Isometry3F64` is used to describe the movement | ||
| and rotation of a robot in 3D space. | ||
|
|
||
| #### Properties of Isometry3F64 | ||
|
|
||
| **Translation**: This represents the linear movement of the robot. | ||
| This is represented as a 3D vector, where each component (x, y, z) describes movement along that axis. | ||
|
|
||
| **Rotation**: This represents the angular movement of the robot. | ||
| This rotation is represented using `Rotation3F64`, which, in this context, uses the Rz method | ||
| to denote a rotation about the z-axis. | ||
|
|
||
| **Rz method**: The Rz method, when applied to Rotation3F64, denotes a rotation about the z-axis. | ||
| In 3D space, the z-axis typically points upwards, perpendicular to the ground plane | ||
| (assuming the x-y plane represents the ground). | ||
| When you rotate an object about the z-axis, it turns around this vertical line, | ||
| much like how a spinning top rotates around its central axis. | ||
|
|
||
| ### Resources | ||
|
|
||
| The use and multiplication of coordinate frame transforms is a fundamental concept in robotics! | ||
| As such, there is an abundance of quality, free resources on the topic. | ||
|
|
||
| For a slightly-less-brief introduction you can refer to [Understanding ROS Transforms](https://foxglove.dev/blog/understanding-ros-transforms). | ||
|
|
||
| If you wish to dive deeper on this topic, one option is [MIT OpenCourseWare - Introduction To Robotics](https://ocw.mit.edu/courses/2-12-introduction-to-robotics-fall-2005/). |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters